convolve#
- ndfilters.convolve(array, kernel, axis=None, where=True, mode='mirror')[source]#
Multidimensional convolution of an array with a given kernel.
This function differs from
scipy.ndimage.convolve()andastropy.convolution.convolve()because it implements a vectorized convolution operation where the kernel is allowed to vary along axes orthogonal to the convolution axes.- Parameters:
array (ndarray | Quantity) – The input array to be convolved.
kernel (ndarray | Quantity) – The convolution kernel. Any non-convolution axes must be broadcastable with array.
axis (None | int | tuple[int, ...]) – The axes of array over which to apply the kernel. If
None, it is assumed that the convolution is applied to all the axes of array.where (bool | ndarray) – An optional mask that can be used to exclude elements of array during the convolution.
mode (Literal['mirror', 'nearest', 'wrap', 'truncate']) – The method used to extend array beyond its boundaries.
- Return type:
Examples
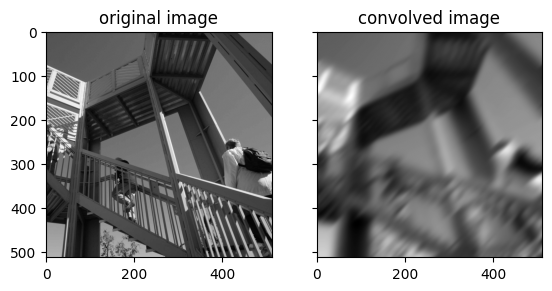
Apply a Gaussian blur to a sample image.
import numpy as np import matplotlib.pyplot as plt import scipy import ndfilters # Define arbitrary coordinate system # of the kenrel x = np.linspace(-1, 1, 51) y = np.linspace(-1, 1, 51) x, y = np.meshgrid(x, y) # Rotate the coordinate system t = np.pi / 4 u = x * np.cos(t) - y * np.sin(t) v = x * np.sin(t) + y * np.cos(t) # Define the standard deviation # in each dimension of the 2D kernel sigma_u = 0.5 sigma_v = 0.1 # Compute a 2D Gaussian kernel kernel_u = np.exp(-np.square(u / sigma_u) / 2) kernel_v = np.exp(-np.square(v / sigma_v) / 2) kernel = kernel_u * kernel_v kernel = kernel / kernel.sum() # Download a sample image img = scipy.datasets.ascent() # Convolve the sample image with the kernel img_convolved = ndfilters.convolve( array=img, kernel=kernel, ) # Plot the results fig, axs = plt.subplots(ncols=2, sharex=True, sharey=True) axs[0].set_title("original image"); axs[0].imshow(img, cmap="gray"); axs[1].set_title("convolved image"); axs[1].imshow(img_convolved, cmap="gray");